A. Pilihlah
jawaban A, B, C, D atau E yang benar dengan memberi tanda silang (X)!
1.
Suatu
teknologi yang berkaitan dengan aplikasi mekanik, elektronik dan sistem yang
berbasis komputer komputer, PLC atau mikroprosesor / kontroller disebut ....
|
a.
|
Sistem Otomasi
|
d.
|
Sistem Kontrol
|
|
b.
|
Sistem
Mekanik
|
e.
|
Sistem
Robotik
|
|
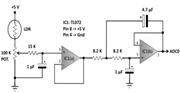
c.
|
Sistem Elektrik
|
|
|
2.
Menyebabkan
produktifitas akan semakin meningkat merupakan Keunggulan dari ....
|
a.
|
Sistem
Elektronik
|
d.
|
Sistem Kontrol
|
|
b.
|
Sistem
Mekanik
|
e.
|
Sistem Robotik
|
|
c.
|
Sistem Otomasi
|
|
|
3.
Elemen Dasar Sistem Otomasi yang
berfungsi untuk menggerakan semua komponen dari sistem otomasi adalah….
|
a.
|
Software
|
d.
|
Power
|
|
b.
|
PLC
|
e.
|
Program
|
|
c.
|
I/O
|
|
|
4.
Untuk mendesain Lay Out PCB dengan
program Diptrace untuk memasukkan gambar IC 40 Pin maka dapat diambil dari
toolbar….
|
a.
|
BAT
|
d.
|
Edge
|
|
b.
|
BGA
|
e.
|
General
|
|
c.
|
Bridge
|
|
|
5. Cairan yang digunakan untuk melarutkan PCB
adalah ….
|
a.
|
Asamcloride
|
d.
|
Asam sitrat
|
|
b.
|
Fericloride
|
e.
|
Natriumcloride
|
|
c.
|
Fericarbon
|
|
|
6.
Untuk melubangi PCB pada pin-pin
komponen, hendaknya menggunakan mata bor berdiameter ….
|
a.
|
0,8
|
d.
|
1,6
|
|
b.
|
1,2
|
e.
|
0,6
|
|
c.
|
1,4
|
|
|
7.
Alat yang digunakan untuk mengetahui tingkat
kuat sinyal yang diberikan ke speaker pada sistem audio adalah …..
|
a.
|
Asamcloride
|
d.
|
Asam sitrat
|
|
b.
|
Function
generator
|
e.
|
Natriumcloride
|
|
c.
|
Decibel meter
|
|
|
8.
Prinsip
kerja pada rangkaian Decibel meter adalah ….
|
a.
|
membalik proses kerja dari proses kerja sensor
|
|
b.
|
membalik proses kerja dari proses kerja
speaker biasa
|
|
c.
|
membalik proses kerja
dari proses kerja arus
|
|
d.
|
membalik proses kerja
dari proses kerja frekuensi
|
|
e.
|
membalik proses kerja
pantulan suara
|
9.
Komponen
elektronik yang berfungsi membandingkan dua nilai kemudian memberikan hasilnya,
mana yang lebih besar dan mana yang lebih kecil adalah …
|
a.
|
Konduktor
|
d.
|
Op-Amp
|
|
b.
|
Induktor
|
e.
|
Komparator
|
|
c.
|
Decibel
meter
|
|
|
10.
Pada alat untuk mengetes transistor dengan
gambar berikut :
Alat tersebut berguna untuk mengukur ….

|
a.
|
Daya
Transistor
|
d.
|
Penguatan arus transistor
|
|
b.
|
Hambat
jensi transistor
|
e.
|
Aliran arus transistor
|
|
c.
|
Hantaran
transistor
|
|
|
11.
Pada
pembuatan PCB untuk rangkaian elektronika maka terdapat tahapan sebagai berikut
:
a)
Menganalisis
gambar rangkaian,
b)
pemrosesan
PCB berdasarkan jalur dan tata letak komponennya.
c)
merencanakan
jalur pada PCB,
d)
membuat
tata letak komponen
|
a.
|
d, c, b, a
|
d.
|
a, b, c, d
|
|
b.
|
a, c, d, b
|
e.
|
b, d, c, a
|
|
c.
|
c, a, b, d
|
|
|
12.
Alat yang biasa digunakan untuk menganalisa dan
mengecek status logika (High atau Low) yang keluar dari rangkaian digital
adalah ….
|
a.
|
Light meter
|
d.
|
Logic probe
|
|
b.
|
Induktansi
meter
|
e.
|
Function generator
|
|
c.
|
Decibel
meter
|
|
|
13.
Pada
Rangkaian logic probe harus
menggunakan tegangan luar (bukan dari rangkaian logika yang ingin diukur)
seperti baterai hal ini karena …..
|
a.
|
Objek yang diukur adalah tegangan
|
|
b.
|
Obyek yang
diukur adalah sinyal
|
|
c.
|
Obyek yang
diukur adalah arus
|
|
d.
|
Obyek yang
diukur adalah frekuensi
|
|
e.
|
Obyek yang
diukur adalah daya
|
14.
Alat ukur Probe Logic biasanya digunakan untuk
mengukur ….
|
a.
|
IC OP-AMP
|
d.
|
IC Regulator
|
|
b.
|
IC TTL
|
e.
|
IC Mikroprocessor
|
|
c.
|
IC Mikrokontroler
|
|
|
15.
Pada
rangkaian Logic Probe berikut ini manakah yang merupakan komponen utamanya ….

|
a.
|
R22K
|
d.
|
R4K7
|
|
b.
|
R470
|
e.
|
Probe
|
|
c.
|
BC171
|
|
|
16.
Pada
Rangkaian Decibel meter menggunakan Op-Amp dengan gambar rangkaian sebagai
berikut :

Rumus
Vout yang benar adalah…..
|
a.
|
Vout = Vin x ( (Rf / Rin) )
|
d.
|
Vout = Vin x ( - (Rf / Rin) )
|
|
b.
|
Vout = Vin - ( (Rf / Rin) )
|
e.
|
Vout = Vin + ( - (Rf / Rin) )
|
|
c.
|
Vout = Vin x (- (Rf +Rin) )
|
|
|
17.
Perangkat
elektronika yang berfungsi untuk membangkitkan gelombang atau sinyal audio
dengan range frekuensi dari 20 Hz hingga 20 KHz sesuai range frekuensi audio
adalah…
|
a.
|
Light meter
|
d.
|
Logic probe
|
|
b.
|
Induktansi
meter
|
e.
|
Function generator
|
|
c.
|
Frekuensimeter
|
|
|
18.
Pada
Frekuensimeter jika pada kedua jenis gelombang listrik tersebut mempunyai
amplitudo yang tidak tetap dan terjadi kenaikan atau penurunan nilai amplitude
secara kontinyu maka bisa dipastikan gelombang tersebut mempunyai nilai
frekuensi lebih besar dari…
|
a.
|
0 Hz
|
d.
|
10 Hz
|
|
b.
|
1000 Hz
|
e.
|
100 Hz
|
|
c.
|
0,1 Hz
|
|
|
19. Pada rangkaian pengukur
intensitas cahaya pada gambar di bawah ini
menggunakan sensor …
|
a.
|
Phototransistor
|
d.
|
Photoresistor
|
|
b.
|
LDR
|
e.
|
NTC
|
|
c.
|
Photodioda
|
|
|
20. Penerangan cahaya (Iuminasi) disimbolkan dengan
E mengikuti hukum kuadrat terbalik sehingga jika permukaan yang diterangi
berpindah dari harga semula untuk iluminasi hubungannya dapat dituliskan dengan
rumus ….
|
a.
|
E = -I / h2 Lux
|
d.
|
E = I / h2 Lux
|
|
b.
|
E = I + h2 Lux
|
e.
|
E = I - h2 Lux.
|
|
c.
|
E = I x h2 Lux
|
|
|
21. Pada rangkaian pengetes IC
gerbang digital, output yang menggambarkan hasil pengetesan dapat ditampilkan
dengan ….
|
a.
|
Buzzer
|
d.
|
Led
|
|
b.
|
Speaker
|
e.
|
LCD
|
|
c.
|
Monitor
|
|
|
22. Untuk junction FET dapat dites
diluar rangkaian dengan ohm meter antara …
|
a.
|
Gate-Sources
|
d.
|
Gate-Phasa
|
|
b.
|
Gate-Gnd
|
e.
|
Gate-Netral
|
|
c.
|
Gate-Vcc
|
|
|
23. Pada Kerusakan FET seringkali
ditandai dengan adanya ….
|
a.
|
tegangan
gate yang normal
|
d.
|
tegangan Vcc yang normal
|
|
b.
|
tegangan gate
yang tidak normal
|
e.
|
tegangan gate yang tidak terukur
|
|
c.
|
tegangan
Vcc yang tidak normal
|
|
|
24. Beberapa hal penting yang menyebabkan
suatu rangkaian digital mengalami kerusakan salah satunya adalah…..
|
a.
|
Kelebihan
Induktansi
|
d.
|
Kelebihan kapasitansi
|
|
b.
|
Kelebihan Resistansi
|
e.
|
Kelebihan Pulsa Clock
|
|
c.
|
Kelebihan
Catu Daya
|
|
|
25. Pada pembuatan alat ukur suhu
dengan sensor LM35, membutuhkan tegangan kerja sebesar ….
|
a.
|
0,5 Volt
|
d.
|
5 Volt
|
|
b.
|
0,05 Volt
|
e.
|
5,5 Volt
|
|
c.
|
5,05 Volt
|
|
|
26. Untuk membuat alat ukur
temperatur berbasis mikro dengan bantuan mikro AVR dibutuhkan rangkaian sistem
minimum yang memiliki clock eksternal, pin pada mikro AVR Atmega8538 untuk
bagian XTAL terletak pada kaki ….
|
a.
|
18 – 19
|
d.
|
10 – 11
|
|
b.
|
20 – 40
|
e.
|
12 – 13
|
|
c.
|
21 – 22
|
|
|
27. Pada pembuatan Rangkaian
intensitas cahaya dengan mikro AVR Atmega8535 menggunakan sensor cahaya maka
dibutuhkan tegangan referensi ADC internal sebesar …
|
a.
|
5 Volt
|
d.
|
0,5 Volt
|
|
b.
|
0,05 Volt
|
e.
|
5,5 Volt
|
|
c.
|
5,05 Volt
|
|
|
28. Pada pembuatan Rangkaian
pengukur intensitas cahaya dengan mikro AVR Atmega8535 menggunakan sensor….
|
a.
|
Phototransistor
|
d.
|
RTD
|
|
b.
|
Photodioda
|
e.
|
Solar Cell
|
|
c.
|
Thermokopel
|
|
|
29. Pada pembuatan PCB dengan
bantuan diptrace saat akan dicetak pada PCB polos dengan teknologi sablon maka
untuk pencetakannya harus tercetak….
|
a.
|
Assy
|
d.
|
Trace
|
|
b.
|
Standard
|
e.
|
Silk
|
|
c.
|
Mirror
|
|
|
30. Pada alat ukur intensitas
cahaya berbasis mikroAVR maka yang diolah ADC
berupa …
|
a.
|
Cahaya
|
d.
|
Tegangan
|
|
b.
|
Lumen
|
e.
|
Sinyal
|
|
c.
|
Intensitas
|
|
|
31. Untuk membuat rangkaian mikro
AVR pada alat ukur intensitas cahaya dibutuhkan IC regulator ….
|
a.
|
7508
|
d.
|
7850
|
|
b.
|
7085
|
e.
|
7805
|
|
c.
|
7058
|
|
|
32. Pada pembuatan alat ukur berbasis
sensor dan Mikro banyak yang menggunakan MikroAVR hal ini karena….
|
a.
|
Memiliki ADC
internal
|
d.
|
Memiliki
daya kerja rendah
|
|
b.
|
Memiliki ADC
Eksternal
|
e.
|
Memiliki
interupt
|
|
c.
|
Memiliki 32
IO
|
|
|
33. Program komputer yang
digunakan untuk memprogram Mikro AVR berbasis bahasa Program ….
|
a.
|
Turbo
|
d.
|
Pascal
|
|
b.
|
C/C++
|
e.
|
Assembly
|
|
c.
|
Delphi
|
|
|
34. Pertimbangan penggunaan Bahasa
BASCOM AVR untuk memprogram MikroAtmega8535 hal ini karena ….
|
a.
|
Memiliki 32
IO
|
d.
|
Komplek
|
|
b.
|
Fasilitas
mudah
|
e.
|
Rumit
|
|
c.
|
Simpel
pembuatannya
|
|
|
35. Pada MikroAVR Atmega8535
terdapat jalur ISP, untuk jalur MOSI terdapat pada pin kaki nomor ….
|
a.
|
6
|
d.
|
9
|
|
b.
|
7
|
e.
|
10
|
|
c.
|
8
|
|
|
36. Pada MikroAVR Atmega8535
terdapat jalur ISP, untuk jalur MISO terdapat pada pin kaki nomor ….
|
a.
|
6
|
d.
|
9
|
|
b.
|
7
|
e.
|
10
|
|
c.
|
8
|
|
|
37. Pada MikroAVR Atmega8535
terdapat jalur ISP, untuk jalur SCK terdapat pada pin kaki nomor ….
|
a.
|
6
|
d.
|
9
|
|
b.
|
7
|
e.
|
10
|
|
c.
|
8
|
|
|
38. Pada MikroAVR Atmega8535
terdapat Port VCC, untuk jalur VCC terdapat pada kaki berapa ….
|
a.
|
6
|
d.
|
9
|
|
b.
|
7
|
e.
|
10
|
|
c.
|
8
|
|
|
39. Fluksi iluminasi (F) yang dipancarkan oleh
sumber diukur dalam Lumen dirumuskan…
|
a.
|
F = I . N Lumen
|
d.
|
F = X .W Lumen
|
|
b.
|
F = W . N
Lumen
|
e.
|
F = I .X
Lumen
|
|
c.
|
F = I . W
Lumen
|
|
|
40.
Suatu
alat meter yang digunakan untuk mengukur banyaknya pengulangan gerakan periodik
perdetik adalah…
|
a.
|
Light meter
|
d.
|
Logic probe
|
|
b.
|
Induktansi
meter
|
e.
|
Function generator
|
|
c.
|
Frekuensimeter
|
|
|
41. Sistem atau alat yang dapat
berperilaku atau meniru perilaku manusia dengan tujuan untuk menggantikan dan mempermudah
kerja/aktifitas manusia
disebut.....
|
a.
|
Otomasi
|
d.
|
Sistem
cerdas
|
|
b.
|
Robot
|
e.
|
Robotika
|
|
c.
|
Mekatronik
|
|
|
42.
Untuk dapat diklasifikasikan sebagai robot,
maka robot harus memiliki kemampuan yaitu .....
|
a.
|
Bisa
mendapatkan informasi dari sekelilingnya
|
|
b.
|
Bisa mendapatkan informasi dari dirinya
|
|
c.
|
Bisa
bergerak sesuai keinginan robot
|
|
d.
|
Dapat
bergerak sesuai program
|
|
e.
|
Bisa mendapatkan perintah dari
sekelilingnya
|
43. Disiplin ilmu yang merupakan penyokong system
mekatronika.......
|
a.
|
Listrik
|
d.
|
Kimia
|
|
b.
|
Fisika
|
e.
|
Biologi
|
|
c.
|
Mekanik
|
|
|
44. Perangkat pendukung robot industri secara umum dapat
dikelompokan dalam 4 bagian yaitu .....
|
a.
|
Program,
Sensor, Aktuator, dan Kontroler
|
|
b.
|
Motor,
Sensor, Aktuator, dan Kontroler
|
|
c.
|
Manipulator,
Processor, Aktuator, dan Kontroler
|
|
d.
|
Manipulator, Sensor, Aktuator, dan Kontroler
|
|
e.
|
Manipulator,
Sensor, Aktuator, dan Monitor
|
45. Robot line tracker merupakan robot
yang dapat bergerak mengikuti track berupa garis hitam setebal ±3 cm merupakan jenis kategori
.....
|
a.
|
Standby
Robot
|
d.
|
Non Mobile
Robot
|
|
b.
|
Universal
Robot
|
e.
|
Mobile Robot
|
|
c.
|
Humanoid
|
|
|
46. Robot otonom yang dapat beradaptasi
dengan perubahan lingkungan atau dirinya sendiri
merupakan jenis robot....
|
a.
|
Standby
Robot
|
d.
|
Non Mobile
Robot
|
|
b.
|
Universal
Robot
|
e.
|
Mobile Robot
|
|
c.
|
Humanoid
|
|
|
47. Dalam system control robotic sistem kontrol yang outputnya tidak diperhitungkan
ulang
oleh kontroler merupakan kontrol....
oleh kontroler merupakan kontrol....
|
a.
|
Loop
terbuka
|
d.
|
Forward Loop
|
|
b.
|
Loop tertutup
|
e.
|
Feedback
Loop
|
|
c.
|
Loop umpan balik
|
|
|
48. Dalam robotic dimana suatu
algoritma (yang dipandang) cerdas
yang diprogramkan ke dalam kontroler robot adalah....
|
a.
|
Kecerdasan
tiruan
|
d.
|
Kecerdasan
Sistem
|
|
b.
|
Kecerdasan
Buatan
|
e.
|
Kecerdasan
Kontrol
|
|
c.
|
Kecerdasan Otomatis
|
|
|
49. Sensor yang memberikan informasi
tentang lingkungan sekitar dan memungkinkan
pada robot untuk
berinteraksi dengan dunia adalah sensor ....
|
a.
|
Array
|
d.
|
piezoresistif
|
|
b.
|
Vision
|
e.
|
motion
|
|
c.
|
Exteroceptive
|
|
|
50. Aktuator yang menghasilkan gerakan
kecil dengan kemampuan kekuatan tinggi
ketika tegangan diberikan
adalah ....
|
a.
|
Array
|
d.
|
piezoresistif
|
|
b.
|
Vision
|
e.
|
piezoelectric
|
|
c.
|
Exteroceptive
|
|
|
51. Aktuator ini digunakan untuk
kecepatan rendah dan aplikasi beban rendah / menengah adalah ....
|
a.
|
piezoresistif
|
d.
|
pneumatik
|
|
b.
|
Vision
|
e.
|
piezoelectric
|
|
c.
|
Exteroceptive
|
|
|
52. Pada pemrograman robotic dengan
bahasa C yang merupakan simbol yang menyatakan operasi mana yang akan dilakukan oleh operand disebut ....
|
a.
|
Operator
|
d.
|
Konstanta
|
|
b.
|
Operand
|
e.
|
Mnemonic
|
|
c.
|
Label
|
|
|
53. Pada pemrograman robotic dengan
bahasa C yang merupakan kumpulan instruksi untuk mengerjakan suatu keperluan tertentu tanpa
mengembalikan suatu nilai disebut ....
|
a.
|
Operator
|
d.
|
Konstanta
|
|
b.
|
Prosedur
|
e.
|
Label
|
|
c.
|
Fungsi
|
|
|
54.
Suatu
kumpulan instruksi untuk
mengerjakan suatu keperluan
tertentu dengan hasil
akhir pengembalian nilai dari
keperluan tersebut disebut ....
|
a.
|
Operator
|
d.
|
Konstanta
|
|
b.
|
Prosedur
|
e.
|
Label
|
|
c.
|
Fungsi
|
|
|
55.
Sensor yang digunakan pada Line Follower
adalah ....
|
a.
|
Phototransistor
|
d.
|
RTD
|
|
b.
|
Thermostat
|
e.
|
Photodioda
|
|
c.
|
Thermokopel
|
|
|
56.
Dalam kerja robot hal yang berkaitan dengan
gerakan robot tanpa
memandang efek inersia/
kelembaman yang terjadi
ketika robot melakukan gerakan
sering disebut dengan ...
|
a.
|
Motion
Effect
|
d.
|
Kinematik
|
|
b.
|
Dinamik
|
e.
|
Mekanik
|
|
c.
|
Rotaiton
|
|
|
57.
Hal yang berhubungan dengan efek inersia
dari struktur robot secara fisik hasil dari gerakan yang ditimbulkan oleh torsi
aktuator ketika robot sedang melakukan pergerakan disebut....
|
a.
|
Motion
Effect
|
d.
|
Kinematik
|
|
b.
|
Dinamik
|
e.
|
Mekanik
|
|
c.
|
Rotaiton
|
|
|
58.
Pada Aplikasi Mikrokontroller AVR untuk
pemrograman pada Robotik terdapat bagian yang berfungsi menghentikan mikrokontroller dalam menjalankan
program sejenak untuk
mengerjakan proses disebut dengan
istilah .....
|
a.
|
Counter
|
d.
|
USART
|
|
b.
|
Operand
|
e.
|
Reset
|
|
c.
|
Iterupsi
|
|
|
59.
Motor yang mampu bekerja 2 arah (searah
jarum jam atau berlawanan jarum
jam) dimana arah
pergerakan motornya dapat dikendalikan hanya
dengan memberikan pengaturan
pulsa pada bagian
pin kontrolnya adalah....
|
a.
|
Motor DC
|
d.
|
Motor Servo
|
|
b.
|
Motor 1
Phasa
|
e.
|
Motor 3
Phasa
|
|
c.
|
Motor Steper
|
|
|
|
|
|
|
|
60.
Sensor yang
dapat merasakan dan
memanipulasi keadaan dengan fungsi
matriks dan algoritma Artificial Intelligent
(AI) digunakan pada system ....
|
a.
|
Otomasi
|
d.
|
Sistem
cerdas
|
|
b.
|
Mekanik
|
e.
|
Robotik
|
|
c.
|
Mekatronik
|
|
|
61.
Dari IC driver Motor Follower manakah yang
merupakan komponen utama driver Motor Line Follower ....
|
a.
|
L298
|
d.
|
LM7805
|
|
b.
|
1N4001
|
e.
|
LM741
|
|
c.
|
LM341
|
|
|
62.
Pada aplikasi robot Arm, maka digunakan
motor-motor yang berperan pada bagian engsel lengannya, motor ini adalah....
|
a.
|
Motor DC
|
d.
|
Motor Servo
|
|
b.
|
Motor 1
Phasa
|
e.
|
Motor 3
Phasa
|
|
c.
|
Motor Steper
|
|
|
63.
Dari rangkaian di bawah ini manakah yang
merupakan komponen utama Sensor cahaya
pada robot Line Follower ..

|
a.
|
LM339
|
d.
|
D2-P2
|
|
b.
|
R1-220
|
e.
|
R3-470
|
|
c.
|
R2-10K
|
|
|
64.
Dari potongan program berikut ini merupakan
subrutin pada robot untuk perintah .....

|
a.
|
Intruksi
Baca Sensor Kiri
|
d.
|
Intruksi
Belok Kanan
|
|
b.
|
Intruksi
Baca Sensor Kanan
|
e.
|
Intruksi
Motor Kanan
|
|
c.
|
Intruksi Belok
Kiri
|
|
|
65.
Pada robot Arm terdapat sendi
yang berfungsi dalam gerakan relatif antara batang-hubung input dan
batang-hubung out-put ber-translasi dengan gerakan luncur (sli-ding),
dimana sumbu kedua batang-hubung sejajar merupakan sendi….
|
a.
|
Sendi linear
|
d.
|
Sendi Puntir
|
|
b.
|
Sendi Ortogonal
|
e.
|
Sendi Putar
|
|
c.
|
Sendi Rotasional
|
|
|
66.
Pada robot arm Penjepit vakum;
digunakan untuk memegang benda kerja…..
|
a.
|
Bulat
|
d.
|
Datar
|
|
b.
|
Pipih
|
e.
|
Logam
|
|
c.
|
Segitiga
|
|
|
67.
Dari Gambar berikut ini manakah bagian yang akan dihubungkan dengan
batang–hubung 0 (link 0) yang merupakan batang-hubung input terhadap
sendi 1…..

|
a.
|
Link 0
|
d.
|
Joint 2
|
|
b.
|
Joint 1
|
e.
|
Link 2
|
|
c.
|
Link 1
|
|
|
68.
Dari gambar bagian sendi pada robot arm
berikut ini merupakan bagian sendi....

|
a.
|
Sendi linear
|
d.
|
Sendi Puntir
|
|
b.
|
Sendi Ortogonal
|
e.
|
Sendi Putar
|
|
c.
|
Sendi Rotasional
|
|
|
69.
Pada robotic Arm, terdapat motor yang
berfungsi sebagai penggerak pada tiap engsel-engselnya, pada bagian kabel
penghubung motor tersebut terdapat 3 kabel yang masing-masing kabel tersebut
berisi jalur ....
|
a.
|
Gnd, Vcc, Input
|
d.
|
Gnd, sinyal, Clock
|
|
b.
|
Gnd, Vcc, Clock
|
e.
|
Gnd, Sinyal, Interupt
|
|
c.
|
Gnd, Vcc, Sinyal
|
|
|
70.
Motor
yang berfungsi berdasarkan pulsa listrik dan setiap pengiriman satu pulsa
ke motor maka motor akan bergerak “selangkah”, yaitu satu putaran sudut kecil
misalnya 1,50 adalah motor ....
ke motor maka motor akan bergerak “selangkah”, yaitu satu putaran sudut kecil
misalnya 1,50 adalah motor ....
|
a.
|
Motor DC
|
d.
|
Motor Servo
|
|
b.
|
Motor 1
Phasa
|
e.
|
Motor 3
Phasa
|
|
c.
|
Motor Steper
|
|
|
71.
Sensor yang bekerja karena
adanya perubahan suhu
disekitar sensor, hasil pendeteksian berupa
sinyal bukan listrik
diubah menjadi sinyal
listrik adalah sensor ......
|
a.
|
Suhu
|
d.
|
Kinetis
|
|
b.
|
Gerak
|
e.
|
Cahaya
|
|
c.
|
Mekanis
|
|
|
72.
Sifatnya
jika kena temperatur semakin panas maka nilai resistansinya akan naik adalah sifat …..
|
a.
|
Thermokopel
|
d.
|
LM35
|
|
b.
|
NTC
|
e.
|
PT100
|
|
c.
|
PTC
|
|
|
73.
Sifatnya
jika kena temperatur semakin panas maka nilai resistansinya akan turun adalah sifat …..
|
a.
|
Thermokopel
|
d.
|
LM35
|
|
b.
|
NTC
|
e.
|
PT100
|
|
c.
|
PTC
|
|
|
74.
Sensor
yang mampu mengukur suhu sangat tinggi sehingga sensor suhu thermocouple ini
sering digunakan untuk industri pengolahan minyak atau baja merupakan sensor….
|
a.
|
PT100
|
d.
|
LM35
|
|
b.
|
NTC
|
e.
|
Thermokopel
|
|
c.
|
PTC
|
|
|
75.
Komponen
elektronika yang memiliki fungsi untuk mengubah
besaran suhu menjadi
besaran listrik dalam
bentuk tegangan adalah….
|
a.
|
PT100
|
d.
|
LM35
|
|
b.
|
NTC
|
e.
|
Thermokopel
|
|
c.
|
PTC
|
|
|
76.
Kekurangan
dari sensor LM35 adalah….
|
a.
|
Membutuhkan
sumber tegangan untuk beroperasi
|
|
b.
|
Beroperasi
pada tegangan 4 sampai 30 V
|
|
c.
|
Rangkaian rumit
|
|
d.
|
Rentang suhu yang jauh, antara -55 sampai +150 oC
|
|
e.
|
Low self-heating, sebesar 0.08 oC
|
77. Sensor suhu yang dibuat dari bahan kawat tahan korosi, kawat
tersebut dililitkan pada bahan keramik
isolator adalah..
|
a.
|
LDR
|
d.
|
LM35
|
|
b.
|
RTD
|
e.
|
NTC
|
|
c.
|
PTC
|
|
|
78. Respon waktu awal yang sedikit lama (0,5 s/d 5 detik, tergantung kondisi
penggu naannya) merupakan kekurangan dari sensor .....
|
a.
|
LDR
|
d.
|
LM35
|
|
b.
|
PTC
|
e.
|
NTC
|
|
c.
|
RTD
|
|
|
79. Stabil pada temperatur yang tinggi, karena jenis logam platina
lebih stabil dari pada jenis logam yang lainnya merupakan kelebihan dari .....
|
a.
|
LDR
|
d.
|
RTD
|
|
b.
|
PTC
|
e.
|
NTC
|
|
c.
|
LM35
|
|
|
80. Sensor suhu yang terbuat dari dua buah lempengan logam yang
berbeda koefisien muainya
(α) yang direkatkan
menjadi satu adalah .....
|
a.
|
LDR
|
d.
|
RTD
|
|
b.
|
PTC
|
e.
|
Bimetal
|
|
c.
|
Thermokopel
|
|
|
81. Digunakan untuk thermal switch di
tempel pada bodi motor dan pada
saat temperatur ambang terlewati maka motor akan mati merupakan aplikasi
sensor.....
|
a.
|
LDR
|
d.
|
RTD
|
|
b.
|
PTC
|
e.
|
Thermokopel
|
|
c.
|
Bimetal
|
|
|
82. Sensor cahaya yang
dapat mengubah perubahan besaran
optik (cahaya) menjadi
perubahan tegangan.
|
a.
|
Photovoltaic
|
d.
|
RTD
|
|
b.
|
Photoconductive
|
e.
|
Thermokopel
|
|
c.
|
NTC
|
|
|
83. Sensor cahaya yang
dapat mengubah perubahan besaran
optik menjadi perubahan
nilai konduktansi (dalam hal ini nilai resistansi) adalah .......
|
a.
|
Photovoltaic
|
d.
|
RTD
|
|
b.
|
Photoconductive
|
e.
|
Thermokopel
|
|
c.
|
NTC
|
|
|
84. Sensor cahaya yang
dapat mengubah besaran cahaya
yang diterima menjadi
besaran konduktansi dan apabila menerima
cahaya maka nilai resistansi turun merupakan sifat sensor..
|
a.
|
Photovoltaic
|
d.
|
NTC
|
|
b.
|
Photoconductive
|
e.
|
Thermokopel
|
|
c.
|
LDR
|
|
|
85. Sensor yang dapat
mengubah intensitas cahaya
menjadi perubahan tegangan
pada outputnya. Dan apabila menerima
pancaran cahaya maka
pada kedua terminal outputnya
akan keluar tegangan
DC sebesar 0,1
volt hingga 0,6
volt merupakan sensor .....
|
a.
|
Phototransistor
|
d.
|
RTD
|
|
b.
|
Photodioda
|
e.
|
Solar Cell
|
|
c.
|
Thermokopel
|
|
|
86. Gambar di bawah ini merupakan symbol dari sensor .....

|
a.
|
Phototransistor
|
d.
|
RTD
|
|
b.
|
Photodioda
|
e.
|
Solar Cell
|
|
c.
|
Thermokopel
|
|
|
87. Sensor yang diaplikasikan pada Robot Line Follower (RTC) kebanyakan
menggunakan sensor ....
|
a.
|
Phototransistor
|
d.
|
RTD
|
|
b.
|
Thermostat
|
e.
|
Thermokopel
|
|
c.
|
Photodioda
|
|
|
88. Pada sensor phototransistor besarnya arus yang mengalir di antara kolektor dan emitor adalah ....
|
a.
|
Sebanding
dengan intensitas cahaya yang diterima photo transistor
|
|
b.
|
Berbanding terbalik dengan intensitas cahaya yang diterima photo
transistor
|
|
c.
|
Sebanding dengan hambatan yang diterima photo transistor
|
|
d.
|
Berbanding lurus dengan kapasitansi yang masuk
|
|
e.
|
Sebanding dengan induktansi yang diterima photo transistor
|
89. Sensor yang berbentuk foil
logam atau kawat logam yang bersifat insulatif (isolasi)
yang ditempel pada benda yang akan diukur tekanannya, dan tekanan berasal dari
pembebanan adalah ...
|
a.
|
Thermostat
|
d.
|
Thermokopel
|
|
b.
|
LVDT
|
e.
|
Strain Gauge
|
|
c.
|
LDR
|
|
|
90. Sensor yang berfungsi untuk membaca pergerakan garis lurus, secara
linear adalah ...
|
a.
|
Thermostat
|
d.
|
Thermokopel
|
|
b.
|
LVDT
|
e.
|
Strain Gauge
|
|
c.
|
LDR
|
|
|
91. Perangkat elektronik yang berfungsi sebagai pengirim program antara
prosessor dengan PC pada komponen utama PLC adalah….
|
a.
|
Programming
Device
|
d.
|
Compiler
|
|
b.
|
ISP Programming
|
e.
|
Input output system
|
|
c.
|
Downloader
|
|
|
92. Perhatikan ladder diagram, bahasa programnya adalah:

a. LD A , AND NOT B , OUT Y , OR C
b. LD A , AND NOT C , OR B , OUT Y
c. LD A , OR C , AND NOT B , OUT Y
d. LD A , OR B , AND NOT C , OUT Y
e. LD A , OR C , AND B , OUT Y
93. Instruksi “END” pada PLC
terletak pada:
a. Program sedang berjalan
b. Input
c. Awal program
d. Akhir
program
e. Output
94. Konvensional kontrol wirring
pada gambar berikut
ini jika dinyatakan
dalam mnemonic code adalah…

a. LD A, OR B, AND C, OUT D
b. LD A, AND NOT C, OR B,
OUT D
c. LD
NOT A, OR B, AND C, OUT D
d. LD NOT A, AND C, OR B,
OUT Y
e.
LD NOT A, AND B, OR C, OUT D
95. Statement list untuk
mengganti simbol ladder NC 0.00 pada
pemrograman PLC di bawah ini adalah
dengan consule yang benar adalah…

a. LD
b. AND LD
c. OR
d. AND
e. LD NOT
96. Bahasa Pemprograman (statement list) pada PLC disebut juga ……
a. Ladder Diagram
b. Alur Diagram
c. Mnemonic
Code
d. Data Base
e. Turbo Pascal
97. Jika suatu PLC OMRON terdiri 20 I/O dapat dikatakan dengan ……
a. I/O 20
b. I/O 30
c. I/O 18 dan I/O 12
d. I 8 dan O 12
e. I 12 dan O 8
b. I/O 30
c. I/O 18 dan I/O 12
d. I 8 dan O 12
e. I 12 dan O 8
98.
Gambar
konvensional kontrol ini untuk mengganti pada pemprograman dengan konsol yang
benar adalah….

a. LD NOT
b. AND LD
c. LD
d. AND
e. OR
99.
Instruksi “LOAD” pada PLC terletak pada….
a. Program sedang berjalan
b. Input
c. Awal program
d. Akhir program
e. Output
a. Program sedang berjalan
b. Input
c. Awal program
d. Akhir program
e. Output
100. Elemen – elemen dalam pengendali terprogram PLC adalah….
a. Elemen, monitor, prosessor (CPU)
b. Elemen Input, elemen Output, elemen prosessor (CPU)
c. Keyboard,mouse, prosessor (CPU)
d. Konputer, prosessor (CPU), asesoris PLC
e. Keyboard, mouse, Prosessor (CPU).
b. Elemen Input, elemen Output, elemen prosessor (CPU)
c. Keyboard,mouse, prosessor (CPU)
d. Konputer, prosessor (CPU), asesoris PLC
e. Keyboard, mouse, Prosessor (CPU).
Tidak ada komentar:
Posting Komentar